
Primera imagen del subsuelo de la cara oculta de la Luna
El rover chino Yutu-2, que desde hace un año recorre la cara oculta de la Luna, ha penetrado con su radar hasta los 40 metros de profundidad para desvelar lo que se esconde bajo la superficie: materiales granulares y muy porosos con rocas de diferentes tamaños, fruto de los impactos que ha sufrido nuestro satélite.
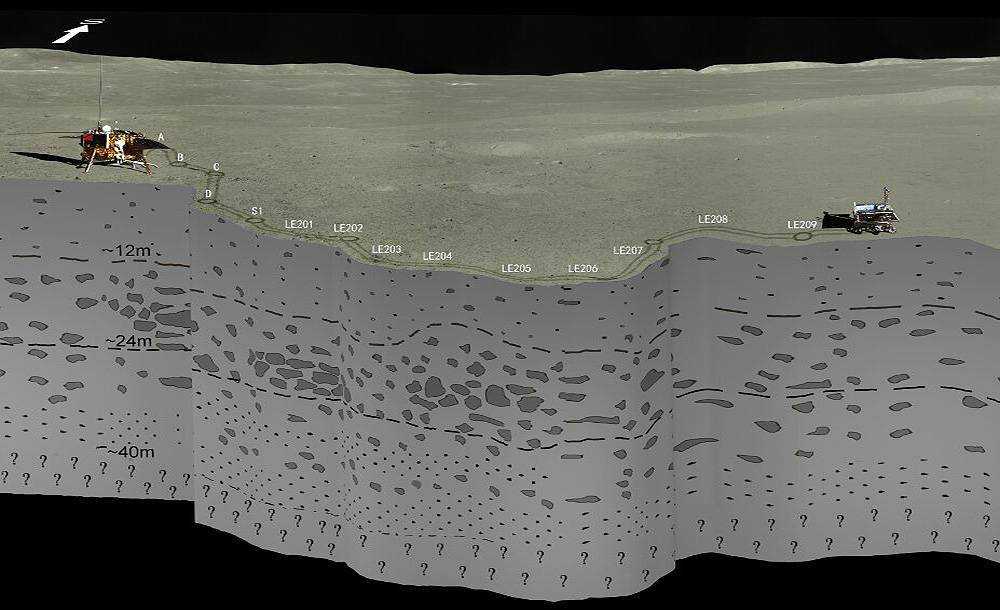
Estratigrafía del subsuelo lunar registrada por radar del rover chino Yutu-2 durante un recorrido de 106 metros (del punto A al LE210) en la cara oculta de la Luna. / CLEP/CRAS/NAOC
Hace poco más de un año, el 3 de enero de 2019, la nave china Chang’E-4 aterrizó cerca del polo sur de la cara oculta de la Luna. Inmediatamente desplegó su rover Yutu-2, que utiliza un radar llamado LPR (Lunar Penetrating Radar) para investigar lo que hay bajo la superficie sobre la que circula.
Los resultados registrados a lo largo de una distancia de 106 metros durante sus dos primeros días lunares (un poco menos de dos meses terrestres) se han publicado ahora en la revista Science Advances, y revelan tres niveles.
El radar del rover chino Yutu-2 ha penetrado hasta 40 metros bajo la superficie lunar para descubrir una estructura de tres niveles con material fino y rocas eyectadas por los impactos que ha sufrido nuestro satélite
La primera capa es la del regolito lunar que se extiende por toda la superficie de nuestro satélite, un material fino (con alguna roca suelta) que en esta zona alcanza los 12 metros de profundidad.
Por debajo, hasta los 24 metros, es un terreno de rocas de entre 20 centímetros y tres metros de longitud. Después, en el tercer nivel, va desapareciendo gradualmente el material rocoso para volver a dominar el fino hasta el límite de 40 metros de profundidad que es capaz de detectar el instrumento. A partir de ahí, los datos ya son muy difusos.
Combinando la información del radar con datos tomográficos y análisis cuantitativos del subsuelo, los autores concluyen que el subsuelo lunar se compone esencialmente de “materiales granulares altamente porosos con rocas incrustadas de diferentes tamaños”, fruto de los impactos que ha recibido nuestro satélite.
Turbulencias de la galaxia primigenia
Según los autores, es probable que el contenido sea el resultado de una galaxia turbulenta temprana, cuando los meteoritos y otros restos de objetos espaciales golpearon con frecuencia la Luna. El lugar del impacto expulsaría material a otras áreas, creando una superficie en forma de cráter sobre un subsuelo con varias capas.
De hecho, el terreno donde alunizó la nave y se mueve el rover es el cráter Von Kármán, localizado en la gran cuenca de impacto Polo Sur-Aitken, una de las más grandes del sistema solar.
Estos resultados constituyen la primera imagen electromagnética de la estructura del subsuelo de la cara oculta de la Luna y la primera obtenida sobre el terreno sobre la arquitectura estratigráfica de un depósito de material eyectado.
«Los resultados ilustran, de una manera sin precedentes, la distribución espacial de los diferentes productos que contribuyen de la secuencia de eyección y sus características geométricas», apunta Chunlai Li, investigador de los Observatorios Astronómicos Nacionales de la Academia de Ciencias de China (NAOC).
«Este trabajo muestra que el uso extensivo de la LPR podría mejorar en gran medida nuestra comprensión de la historia de los impactos y vulcanismo en la Luna y arrojar nueva luz sobre la comprensión de la evolución geológica del lado no visible de la Luna», añade.
El investigador destaca que la penetración de la señal de CE-4 es mucho mayor que la medida por la nave espacial anterior, Chang’E-3, que alunizó en la cara visible de la Luna: «El subsuelo en el sitio de aterrizaje CE-4 es mucho más transparente a las ondas de radio, y esta observación cualitativa sugiere un contexto geológico totalmente diferente para los dos lugares de aterrizaje».
Se presenta la primera imagen electromagnética de la estructura del subsuelo de la cara oculta de la Luna y la primera sobre el terreno de un depósito de material eyectado
Li y su equipo utilizaron el LPR en un canal de alta frecuencia de 500 MHz para llegar hasta los 40 metros, más de tres veces la profundidad alcanzada anteriormente por CE-3. Estos datos fueron los que permitieron crear la imagen aproximada de la estratigrafía subsuperficial lunar.
«A pesar de la buena calidad de la imagen del radar a lo largo de la ruta del rover, la complejidad de la distribución espacial y la forma de las características del radar dificultan la identificación de las estructuras geológicas y los eventos que generaron sus características», reconoce Yan Su, otro de los autores afiliado a NAOC.
Chang’e 5 traerá muestra lunares
Los investigadores confían en que el rover facilite nuevos datos en los próximos meses. Además, en diciembre de 2020 está previsto lanzar la nueva generación: Chang’e 5, con el objetivo de traer muestras lunares a la Tierra.
El nombre de las misiiones Chang’E hace referencia a una diosa que habita en la Luna, según la mitología china. La nave 4 es la sucesora de Chang’e 3, que alunizó en 2013 con el rover Yutu (Conejo de Jade), que logró recorrer un centenar de metros antes de que fallaran sus sistemas. Su sucesor ha teniendo más éxito.
Referencia:
Chunlai Li et al. «The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar». Science Advances, febrero de 2020
Últimas noticias publicadas Ver más


